
All Categories
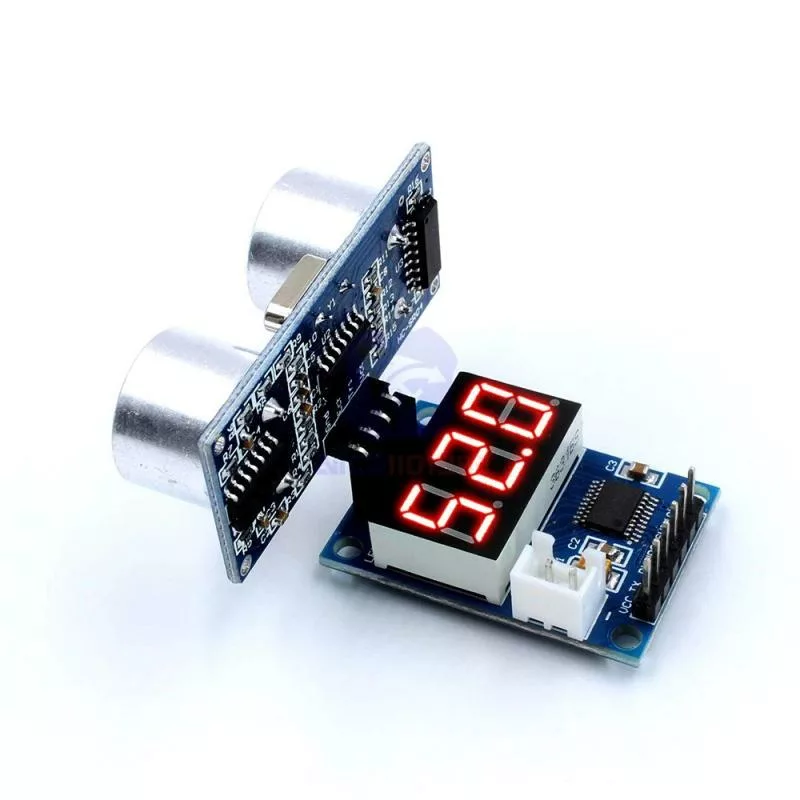
Découvrez notre sélection de capteurs de distances (télémètres IR) pour une mesure précise et fiable. Idéaux pour les passionnés de bricolage ou les professionnels, ces appareils vous permettent de mesurer les distances avec facilité et précision. Trouvez le modèle parfait pour vos besoins parmi notre gamme variée de capteurs de distances (télémètres IR). Commandez dès maintenant et simplifiez vos tâches de mesure au quotidien.











No account yet?
Create an Account